DL| Fully Convolutional Networks(FCN) for Semantic Segmentation 구조, FCN-32s, 16s, 8s 구현과 설명
Semantic Segmentation을 위한 FCN 모델의 핵심 구조와 개념을 상세히 분석. VGG 기반의 인코더 구조부터 FC Layer의 Conv화, Transposed Convolution, Skip Connection을 이용한 FCN-32s/16s/8s의 성능 개선 원리까지 코드와 함께 정리
FCN(Fully Convolution Network) FCN 논문 리뷰 — Fully Convolutional Networks for Semantic Segmentation FCN BoostCampAITECH
- Fully Convolutional Networks for Semantic Segmentation(FCN)의 기본 개념과 구조
- FC Layer와 Conv Layer의 차이점
- Transposed Convolution의 원리
- Skip Architecture를 통한 성능 향상 방법
- FCN 모델 구현
Fully Convolutional Networks for Semantic Segmentation(FCN)의 기본 개념과 구조
Semantic Segmentation 모델을 위해
기존의 image classification에서 우수한 성능을 보인 CNN 기반 모델을 변형시킨 구조
- VGG 네트워크 백본을 사용: 다양한 모델 중 VGG가 가장 좋은 성능을 보였다고 함
- VGG 네트워크의 FC Layer(nn.Linear)를 Convolution으로 대체: 위치 정보를 보존하기 위함
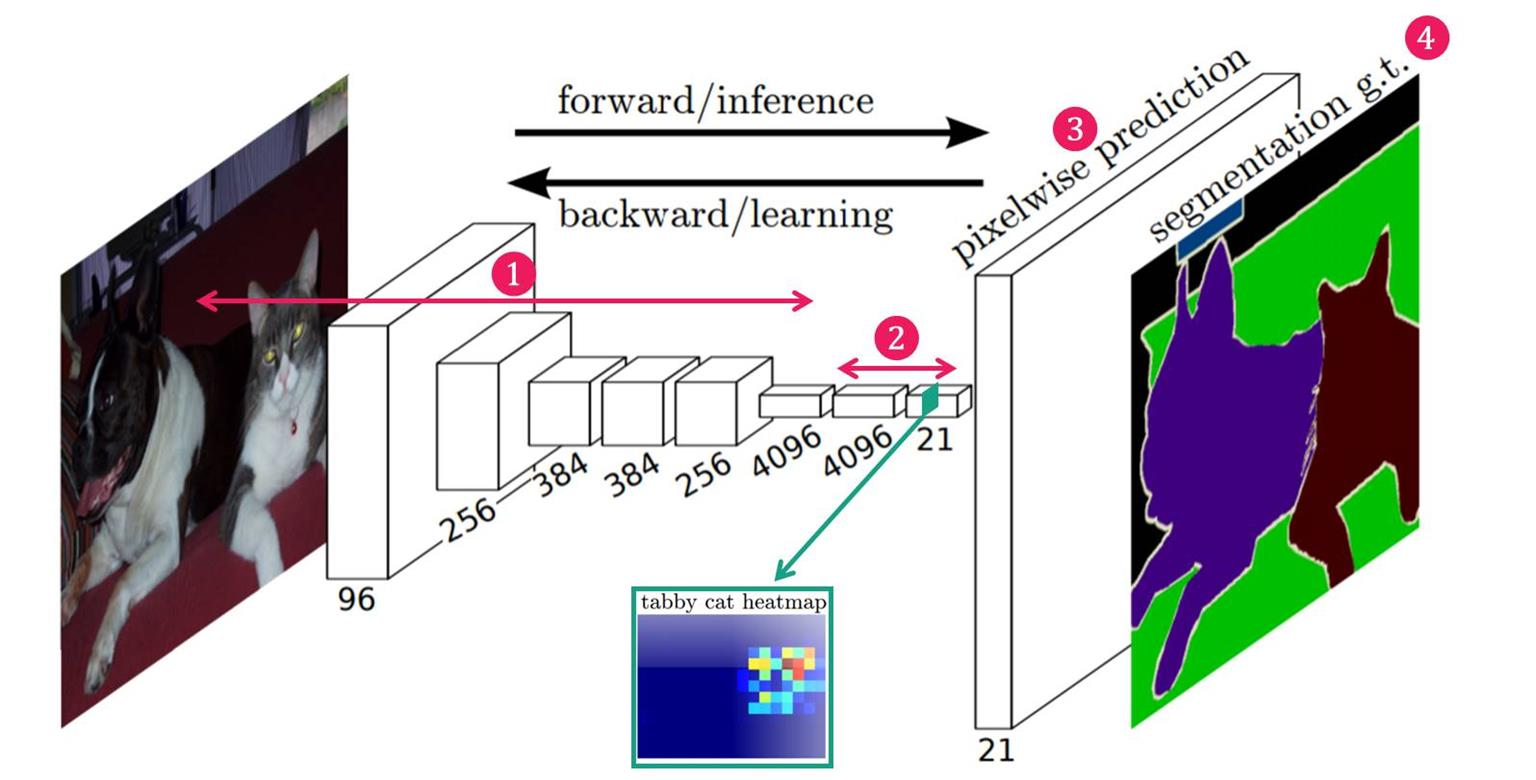
- Transposed Convolution을 이용하여 Pixel Wise Prediction을 수행함
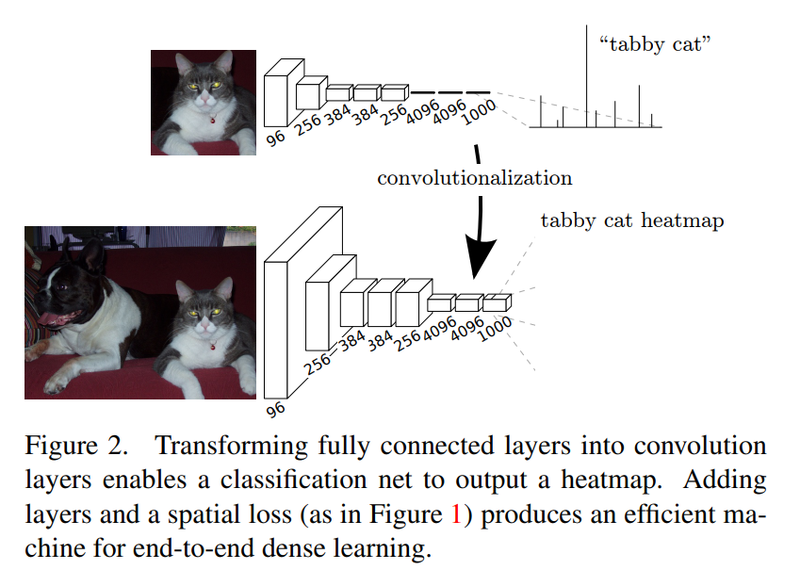
이미지의 feature를 추출하기 위한 네트워크의 뒷단에 fully connected layer를 붙여, 계산한 class 별 확률을 바탕으로 image classficiation을 수행
→ FCN에서는 Segmentation을 하기 위해서 fully connected layer가 아닌 CNN을 붙임
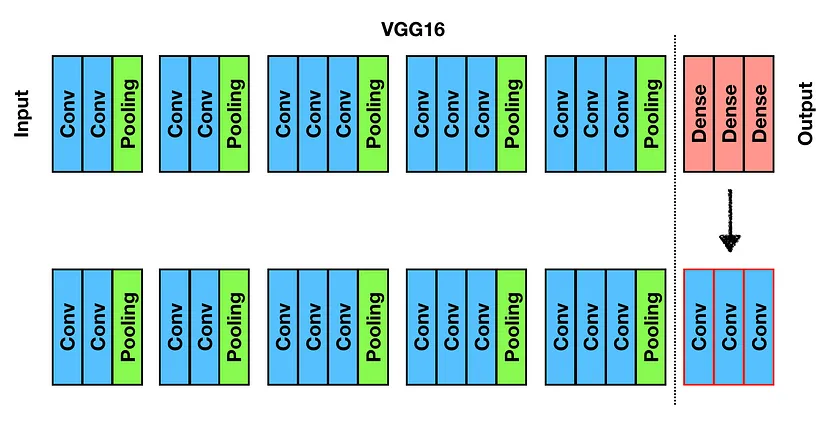
VGG 16을 예시로 보면
뒤의 3 Dense Layers가 모두 Conv-layer로 변경: 원래 CNN 구조는 network의 input layer에서 중간 부분까지는 ConvNet을 이용하여 영상의 feature를 추출하고, 해당 feature를 ouptu layer 부분에서 FC-Layer를 통해 이미지를 분류했음
Segmentation의 목적은 원본 이미지의 각 pixel에 대해 클래스를 구분하고 instance와 background를 분할해야하므로 위치 정보가 매우 중요해서 위치 정보를 유지하면서 Class 단위의 feature map을 얻어 segmentation하기 위해 CNN으로 대체
Dense Layer에서 Conv Layer로 변환하는 방식은 다음과 같으며 첫 번째 fully-connected layer를 (7x7x512) 4096 filter conv 로 변환하면 가중치의 수가 유지됨
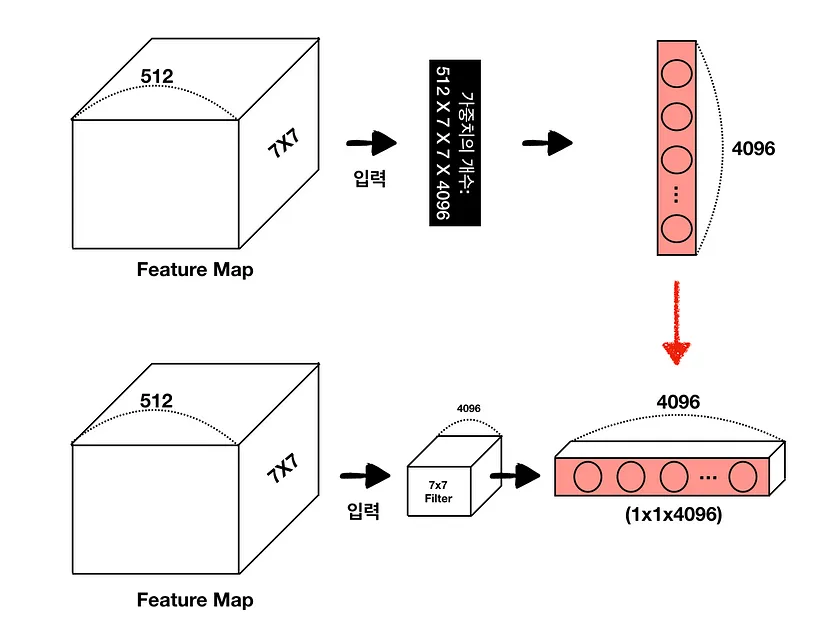
마지막 FC-Layer의 경우 채널 차원을 클래스에 맞춘 1x1 conv로 변환
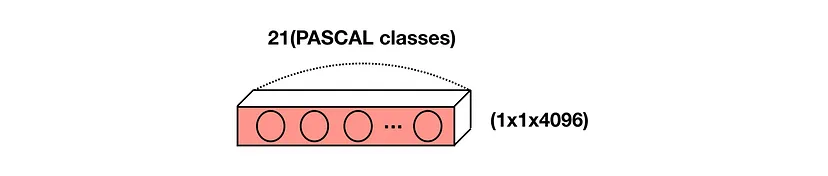
다섯 번째 max-pooling(size:2x2, stride:2) 연산 후 feature map의 크기는 7x7이 됨(입력 이미지의 크기가 224x224인 경우) Feature map의 크기는 일반적으로 원본 이미지보다 작음
Convolutionalization을 통해서 출력 feature map은 원본 이미지의 위치 정보를 내포할 수 있게 되었지만 픽셀 단위 예측과 비교했을 때 FCN의 출력 feature map은 너무 coarse(거친, 알맹이가 큰) 특성을 가지게 됨
Coarse map을 원본 이미지 크기에 가까운 Dense map으로 변환해 줄 필요가 있으며 적어도 input image size * 1/32 보다는 해상도가 높을 필요가 있음
해결 방법으로 Coarse map에서 Dense map을 얻는 방법으로는 Interpolation, Deconvolution, Unpooling, Shift and stitch와 같이 있음
Pooling을 안쓰거나 stride를 줄여서 feature map을 줄이면 더 세밀한 부분을 볼 수 있지만 receptive field가 줄어들어서 이미지의 context를 놓치게 되며, Pooling을 하는 이유 중 하나인 특징맵의 크기를 줄여서 파라미터 수를 줄이고 학습시간을 줄이려한 의도가 없어짐
FCNs에서는 아래의 두가지의 방법을 사용하여 Coarse Feature map으로부터 Dense prediction을 구했음
- Bilinear Interpolation
Backwards convolution
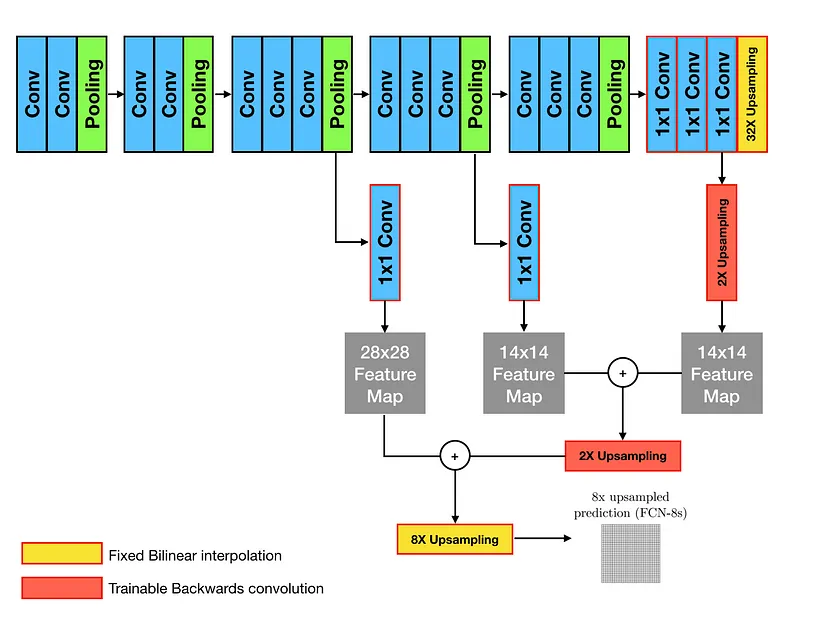
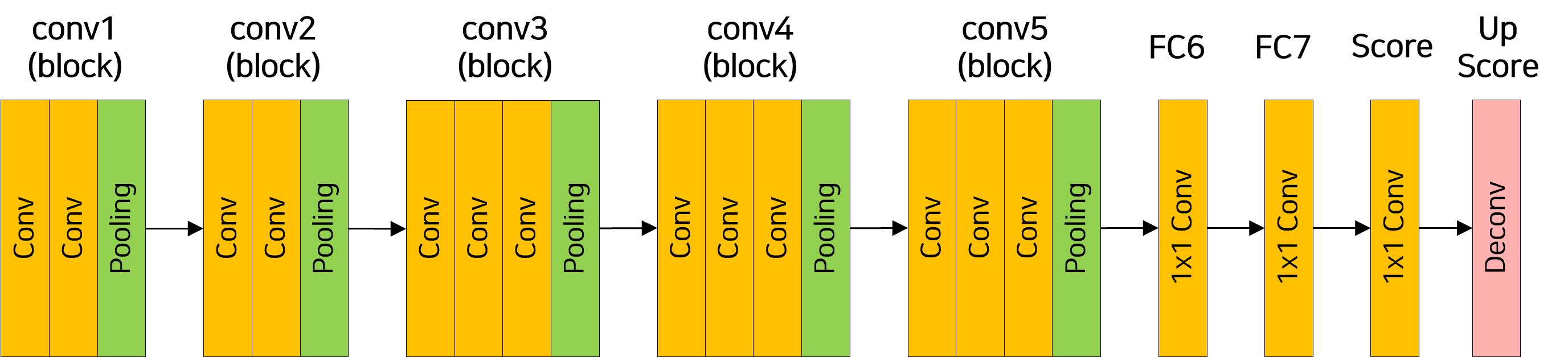
초기 Segmentation을 위한 모델(FCN-32s)은 다음과 같이 VGG모델을 컨볼루션화한 구조에 Bilinear interpolation 작업을 더함으로써 얻을 수 있었는데 feature map의 크기가 너무 작아서 dense map의 정보는 여전히 거침
stride가 32인 up-sampling 과정에서 많은 정보가 손실되었기 때문에 Skip Architecture를 적용
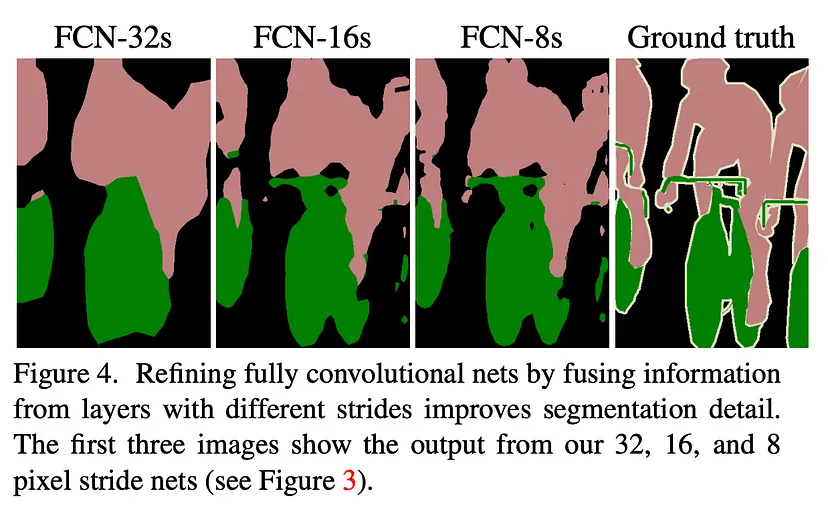
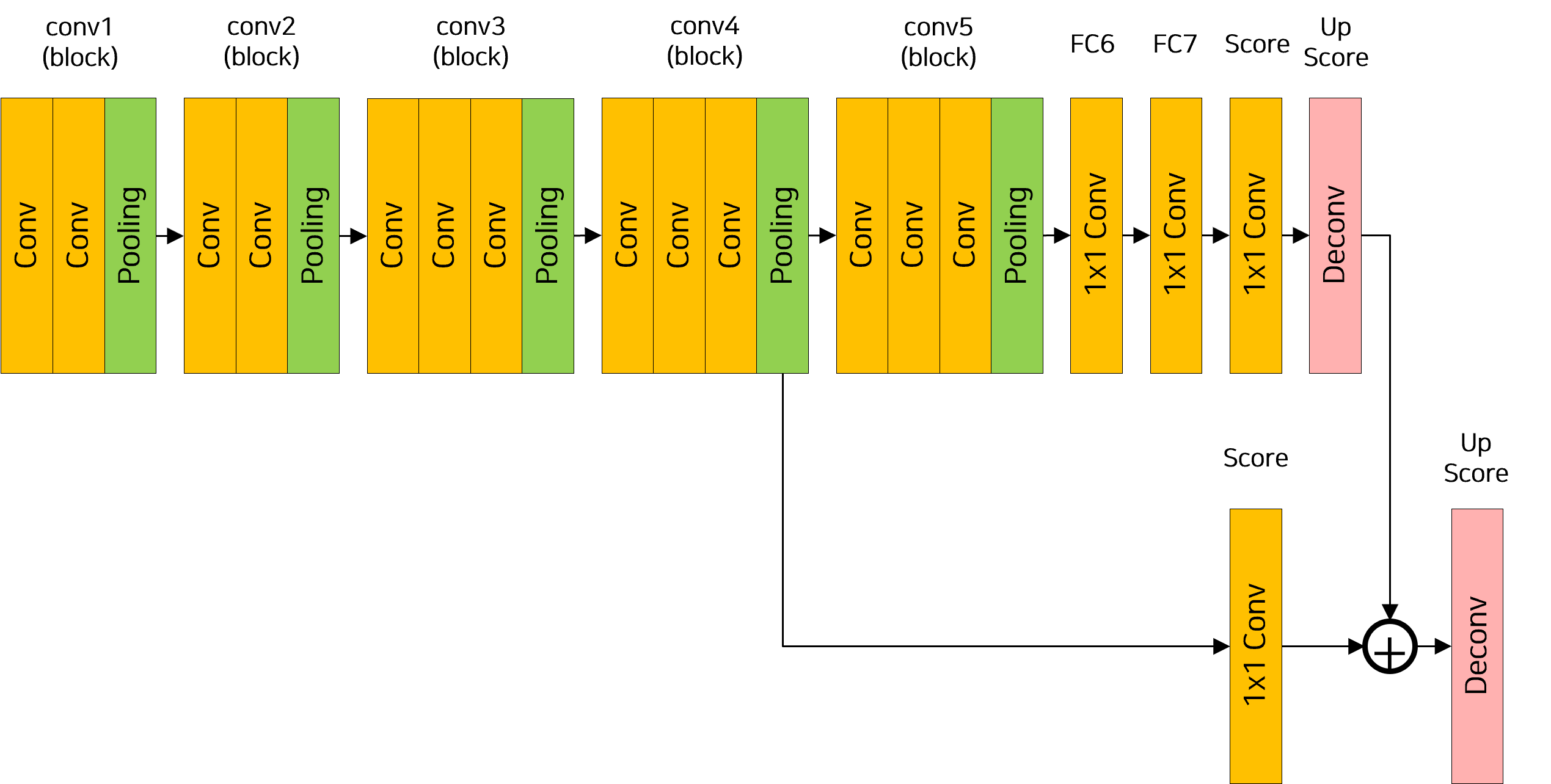
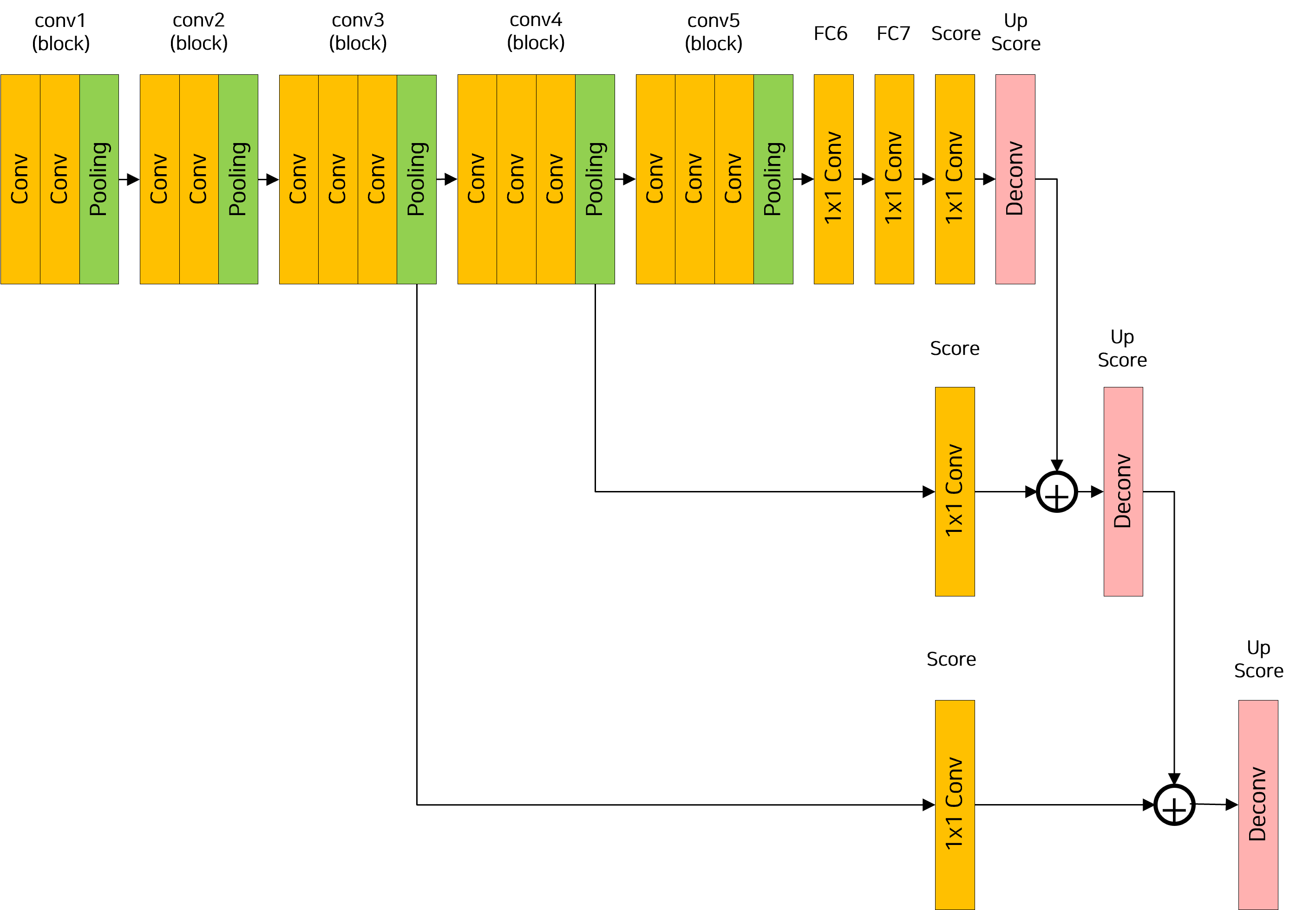
아래의 그림들은 FCN-16s, FCN-8s로 Skip Architecture를 적용한 것
각 Pooling에 Prediction을 위해 추가된 Conv layer의 필터는 0으로, Trainable Backwards convolution은 Bilinear interpolation으로 초기화한 후 학습을 진행하여 개선된 segmentation 결과를 얻을 수 있었음
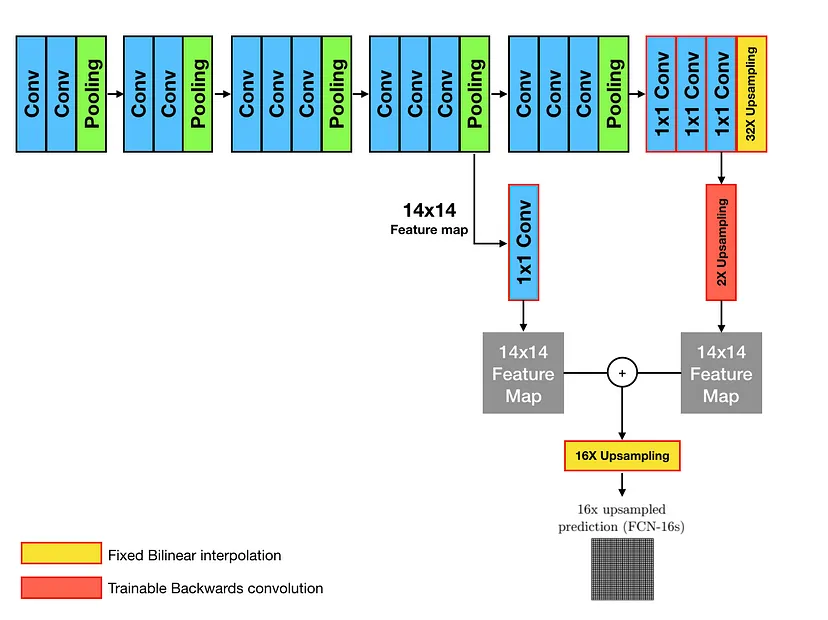
실제 성능 지표에서도 FCN-32s → FCN-16s → FCN-8s 순서로 결과가 나아지는 것을 확인할 수 있음
FC Layer와 Conv Layer의 차이점
FC Layer의 한계점
이미지의 위치 정보가 사라짐
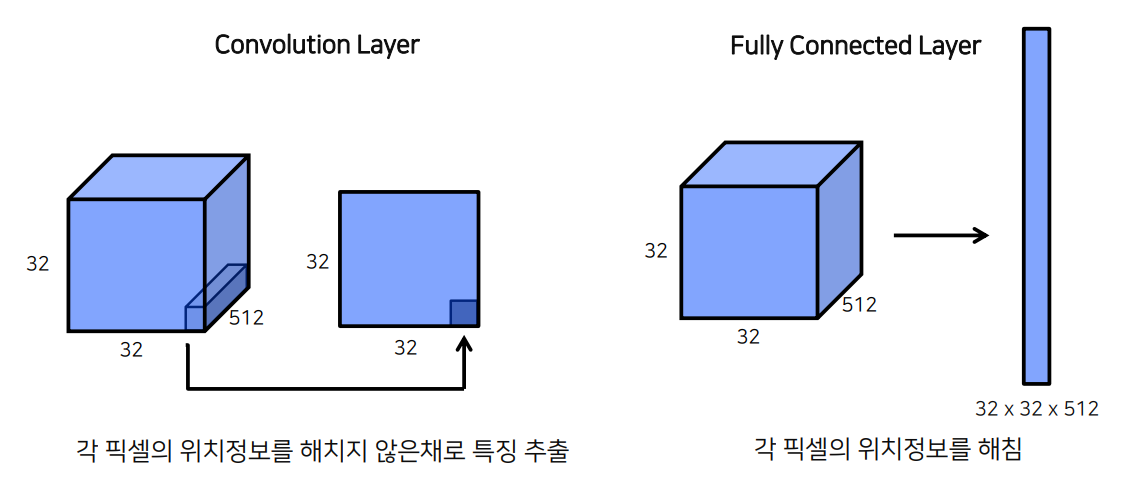
FC Layer를 Convolution layer로 바꿈으로써 위치 정보를 해치지 않은 상태로 특징 추출이 가능해짐
input image의 사이즈가 고정되어 있음
1x1 Convolution을 사용
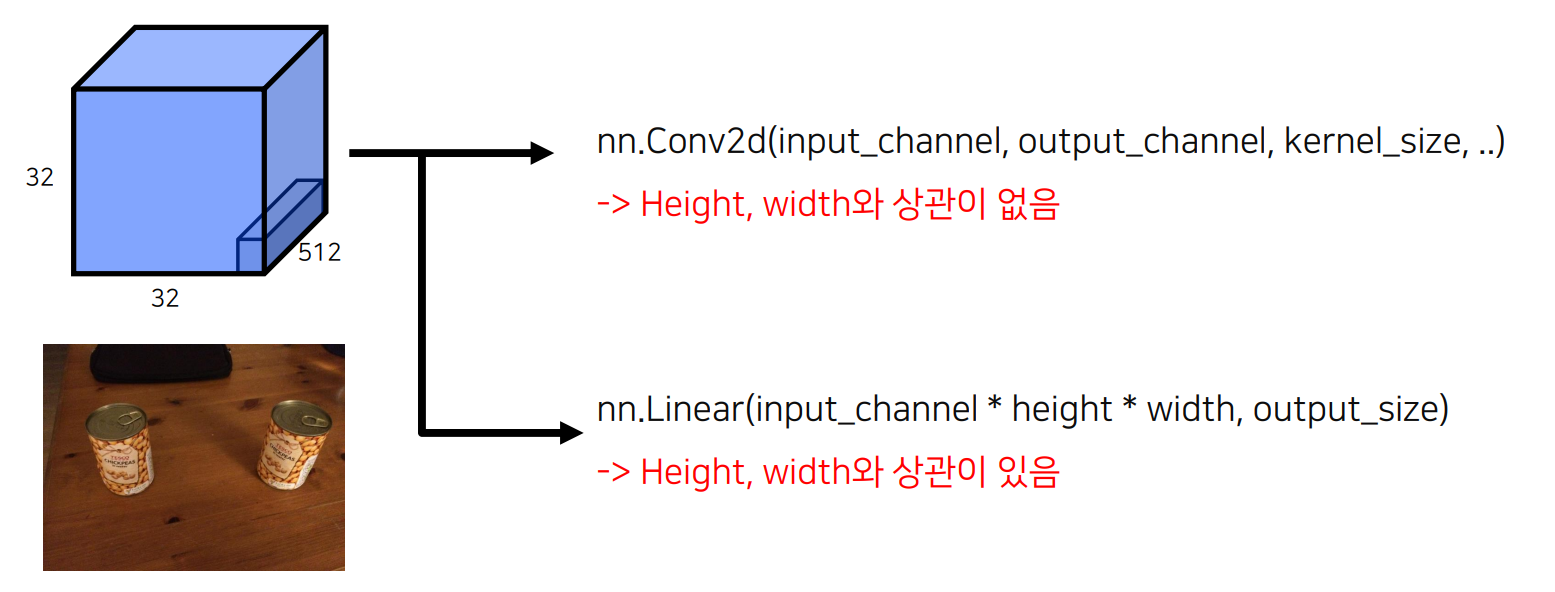
임의의 입력값에 대해서도 상관이 없음, Convolution은 kernel의 파라미터에 의해 영향을 받고, 이미지 혹은 레이어의 크기에 대해서는 상관이 없기 때문
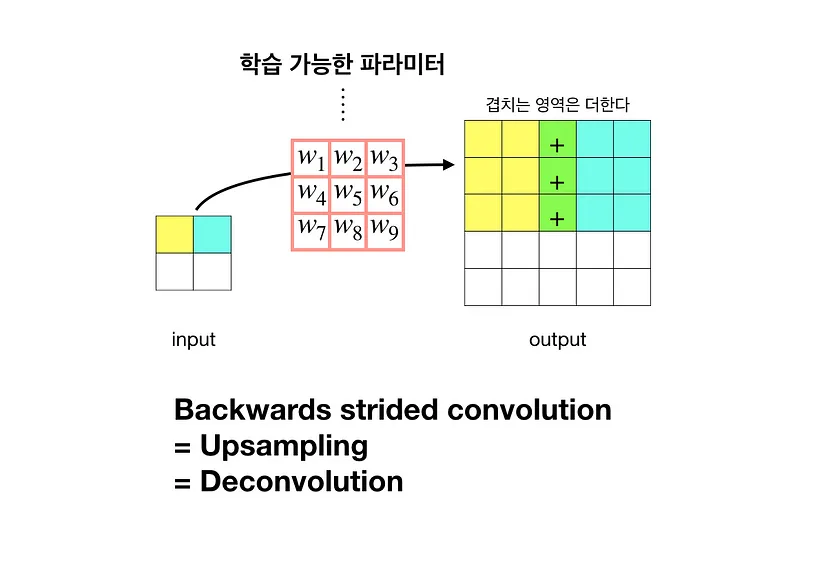
Transposed Convolution의 원리
정의
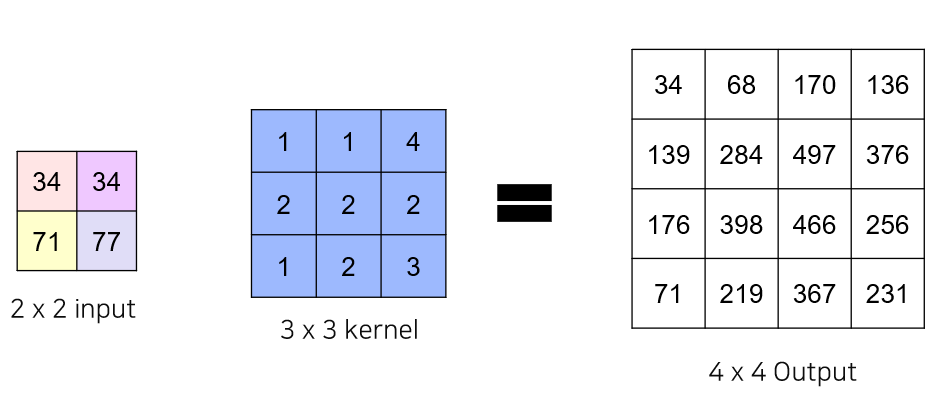
- Convolution과 마찬가지로 학습이 가능한 파라미터를 통해서 줄어든 이미지를 다시 키우는 Convolution
- Transposed Convolution의 값은 이전 Convoultion의 값과 동일한 값이 아닌 Convolution처럼 학습이 가능한 파라미터, Backpropagation 과정에서 업데이트 되는 값임
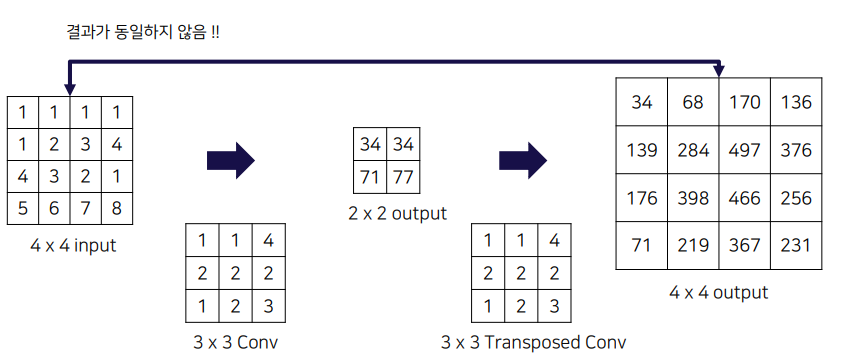
Upsampling == Deconvolution == Transposed Convolution 모두 동일하게 쓰이지만 Transposed Convolution이 가장 정확한 표현임
- Deconvolution이라는 단어는 Conv의 input과 Deconv의 output이 동일하지 않아서 정확하게 맞는 표현은 아님(하지만 같이 자주 사용함)
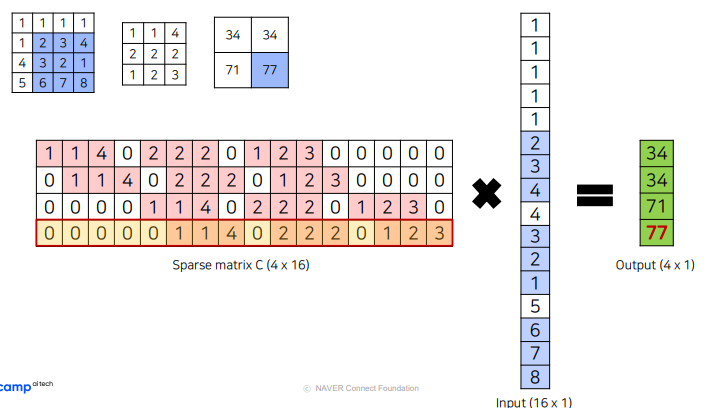
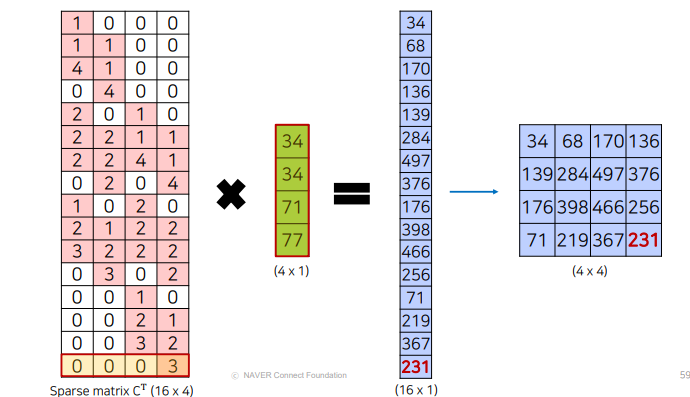
- Transposed Convolution으로 표현하는 이유는 Convolution을 한 결과를 Transpose하여 Convolution을 진행했을 때 같은 결과가 나오기 때문임
과정
각각의 input 픽셀과 kernel 픽셀을 stride만큼 이동하여 elementwise product를 수행한 후에 같은 위치의 값은 모두 summation
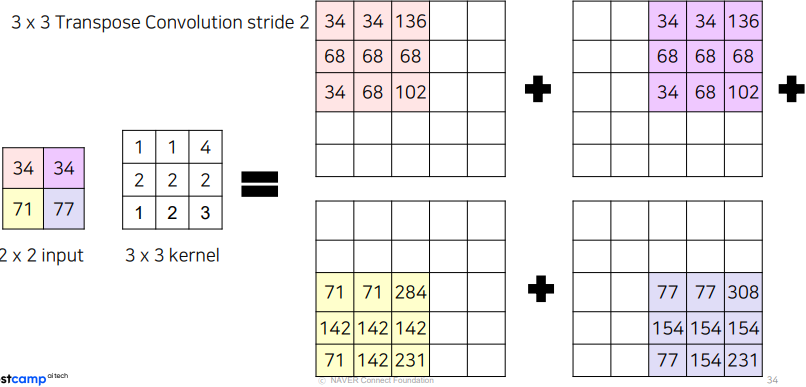
- 5x5 output: stride2
- 5x5 output, padding1: 3x3
Convolution
Transposed convolution
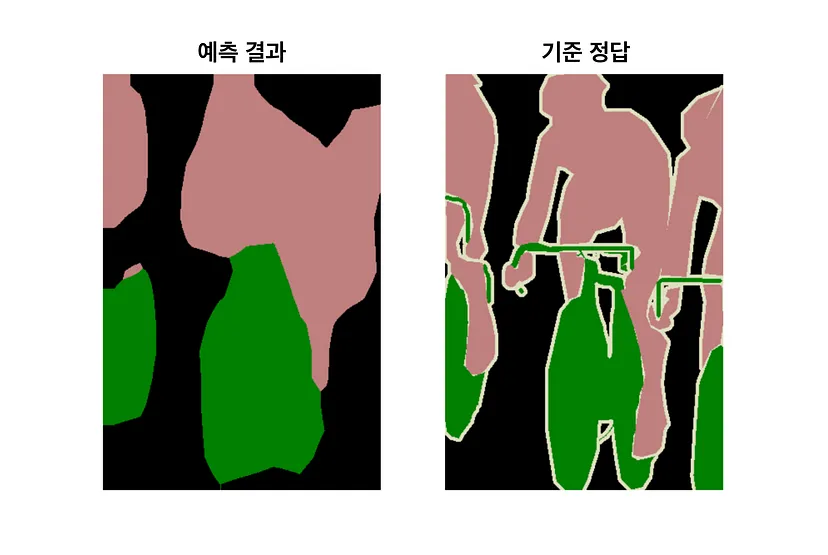
Skip Architecture를 통한 성능 향상 방법
FCN-32s가 GT와 비교했을 때 디테일을 잘 예측하지 못함
중간에 pooling의 output 값을 Deconvolution 과정에서 사용하기로 함
- MaxPooling에 의해서 잃어버린 정보를 복원해주는 작업을 진행
- Upsampled Size를 줄여주기에 좀 더 효율적인 이미지 복원이 가능
FCN 모델 구현
ConvTranspose2d: PyTorch에서 Transposed Convolution 또는 Deconvolution 연산을 수행하는 2D 레이어로, Conv2d와 반대로 작동
FCN-32s
class FCN32s(nn.Module):
def __init__(self, num_classes=len(CLASSES)):
super(FCN32s, self).__init__()
# Conv + ReLU
def CBR(in_channels, out_channels, kernel_size=3, stride=1, padding=1):
return nn.Sequential(
nn.Conv2d(in_channels=in_channels,
out_channels=out_channels,
kernel_size=kernel_size,
stride=stride,
padding=padding),
nn.ReLU(inplace=True)
)
# conv1: 입력(3채널) → 64채널 → 64채널 → maxpool
self.conv1_1 = CBR(3, 64, 3, 1, 1)
self.conv1_2 = CBR(64, 64, 3, 1, 1)
self.pool1 = nn.MaxPool2d(2, stride=2, ceil_mode=True) # 출력 해상도 1/2
# conv2: 64 → 128 → 128 → maxpool
self.conv2_1 = CBR(64, 128, 3, 1, 1)
self.conv2_2 = CBR(128, 128, 3, 1, 1)
self.pool2 = nn.MaxPool2d(2, stride=2, ceil_mode=True) # 출력 해상도 1/4
# conv3: 128 → 256 → 256 → 256 → maxpool
self.conv3_1 = CBR(128, 256, 3, 1, 1)
self.conv3_2 = CBR(256, 256, 3, 1, 1)
self.conv3_3 = CBR(256, 256, 3, 1, 1)
self.pool3 = nn.MaxPool2d(2, stride=2, ceil_mode=True) # 출력 해상도 1/8
# conv4: 256 → 512 → 512 → 512 → maxpool
self.conv4_1 = CBR(256, 512, 3, 1, 1)
self.conv4_2 = CBR(512, 512, 3, 1, 1)
self.conv4_3 = CBR(512, 512, 3, 1, 1)
self.pool4 = nn.MaxPool2d(2, stride=2, ceil_mode=True) # 출력 해상도 1/16
# conv5: 512 → 512 → 512 → 512 → maxpool
self.conv5_1 = CBR(512, 512, 3, 1, 1)
self.conv5_2 = CBR(512, 512, 3, 1, 1)
self.conv5_3 = CBR(512, 512, 3, 1, 1)
self.pool5 = nn.MaxPool2d(2, stride=2, ceil_mode=True) # 출력 해상도 1/32
# FC6: conv 대신 1x1 conv 사용 (VGG의 fc6을 conv로 치환)
self.fc6 = CBR(512, 4096, 1, 1, 0) # 크기 유지, 채널만 증가
self.drop6 = nn.Dropout2d() # dropout regularization
# FC7: fc6과 동일하게 처리
self.fc7 = CBR(4096, 4096, 1, 1, 0)
self.drop7 = nn.Dropout2d()
# score layer: 4096 → num_classes (1x1 conv로 클래스 수만큼 채널 줄임)
self.score_fr = nn.Conv2d(4096, num_classes, kernel_size=1, stride=1, padding=0)
# upsampling layer: Transposed Conv 사용 (32배 업샘플링)
self.upscore32 = nn.ConvTranspose2d(
num_classes, # 입력 채널 수
num_classes, # 출력 채널 수 (segmentation map)
kernel_size=64, # 커널 크기
stride=32, # 32배 업샘플링
padding=16 # padding 조정으로 정확한 크기 복원
)
def forward(self, x):
# VGG 구조와 동일한 인코더
h = self.conv1_1(x)
h = self.conv1_2(h)
h = self.pool1(h)
h = self.conv2_1(h)
h = self.conv2_2(h)
h = self.pool2(h)
h = self.conv3_1(h)
h = self.conv3_2(h)
h = self.conv3_3(h)
h = self.pool3(h)
h = self.conv4_1(h)
h = self.conv4_2(h)
h = self.conv4_3(h)
h = self.pool4(h)
h = self.conv5_1(h)
h = self.conv5_2(h)
h = self.conv5_3(h)
h = self.pool5(h)
# Fully convolutional layers
h = self.fc6(h)
h = self.drop6(h)
h = self.fc7(h)
h = self.drop7(h)
h = self.score_fr(h) # class score map
upscore32 = self.upscore32(h) # 32배 업샘플링 → 입력 크기 복원
return upscore32 # shape: (N, num_classes, H, W)
FCN-16s
class FCN16s(nn.Module):
def __init__(self, num_classes=len(CLASSES)):
super(FCN16s, self).__init__()
self.relu = nn.ReLU(inplace=True)
# Conv + ReLU
def CBR(in_channels, out_channels, kernel_size=3, stride=1, padding=1):
return nn.Sequential(
nn.Conv2d(in_channels=in_channels,
out_channels=out_channels,
kernel_size=kernel_size,
stride=stride,
padding=padding),
nn.ReLU(inplace=True)
)
# conv1: 3 → 64 → 64 → pooling (1/2)
self.conv1_1 = CBR(3, 64)
self.conv1_2 = CBR(64, 64)
self.pool1 = nn.MaxPool2d(2, stride=2, ceil_mode=True)
# conv2: 64 → 128 → 128 → pooling (1/4)
self.conv2_1 = CBR(64, 128)
self.conv2_2 = CBR(128, 128)
self.pool2 = nn.MaxPool2d(2, stride=2, ceil_mode=True)
# conv3: 128 → 256 → 256 → 256 → pooling (1/8)
self.conv3_1 = CBR(128, 256)
self.conv3_2 = CBR(256, 256)
self.conv3_3 = CBR(256, 256)
self.pool3 = nn.MaxPool2d(2, stride=2, ceil_mode=True)
# conv4: 256 → 512 → 512 → 512 → pooling (1/16)
self.conv4_1 = CBR(256, 512)
self.conv4_2 = CBR(512, 512)
self.conv4_3 = CBR(512, 512)
self.pool4 = nn.MaxPool2d(2, stride=2, ceil_mode=True)
# pool4 이후 feature map을 1x1 conv로 클래스 수만큼 줄임
self.score_pool4_fr = nn.Conv2d(512, num_classes, kernel_size=1)
# conv5: 512 → 512 → 512 → 512 → pooling (1/32)
self.conv5_1 = CBR(512, 512)
self.conv5_2 = CBR(512, 512)
self.conv5_3 = CBR(512, 512)
self.pool5 = nn.MaxPool2d(2, stride=2, ceil_mode=True)
# fully conv layers (FC6, FC7을 conv로 대체)
self.fc6 = nn.Conv2d(512, 4096, 1)
self.relu6 = nn.ReLU(inplace=True)
self.drop6 = nn.Dropout2d()
self.fc7 = nn.Conv2d(4096, 4096, 1)
self.relu7 = nn.ReLU(inplace=True)
self.drop7 = nn.Dropout2d()
# 최종 score map 출력 (4096 → 클래스 수)
self.score_fr = nn.Conv2d(4096, num_classes, kernel_size=1)
# Deconv: 1/32에서 1/16로 업샘플링
self.upscore2 = nn.ConvTranspose2d(num_classes, num_classes,
kernel_size=4, stride=2, padding=1)
# Deconv: 1/16에서 원본 해상도 복원
self.upscore16 = nn.ConvTranspose2d(num_classes, num_classes,
kernel_size=32, stride=16, padding=8)
def forward(self, x):
# 인코더: VGG와 동일한 구조
h = self.conv1_1(x)
h = self.conv1_2(h)
h = self.pool1(h)
h = self.conv2_1(h)
h = self.conv2_2(h)
h = self.pool2(h)
h = self.conv3_1(h)
h = self.conv3_2(h)
h = self.conv3_3(h)
h = self.pool3(h)
h = self.conv4_1(h)
h = self.conv4_2(h)
h = self.conv4_3(h)
pool4 = h = self.pool4(h) # skip connection용 저장
score_pool4c = self.score_pool4_fr(pool4) # pool4 특징에 대해 1x1 conv
h = self.conv5_1(h)
h = self.conv5_2(h)
h = self.conv5_3(h)
h = self.pool5(h)
h = self.fc6(h)
h = self.relu6(h)
h = self.drop6(h)
h = self.fc7(h)
h = self.relu7(h)
h = self.drop7(h)
h = self.score_fr(h) # 클래스 점수 맵
upscore2 = self.upscore2(h) # 1/32 → 1/16 업샘플링
h = upscore2 + score_pool4c # skip connection 결합
upscore16 = self.upscore16(h) # 1/16 → 원본 해상도 복원
return upscore16 # shape: (N, num_classes, H, W)
FCN-8s
class FCN8s(nn.Module):
def __init__(self, num_classes=len(CLASSES)):
super(FCN8s, self).__init__()
# Conv + ReLU
def CBR(in_channels, out_channels, kernel_size=3, stride=1, padding=1):
return nn.Sequential(
nn.Conv2d(in_channels=in_channels,
out_channels=out_channels,
kernel_size=kernel_size,
stride=stride,
padding=padding),
nn.ReLU(inplace=True)
)
# conv1: 입력 → 64 → 64 → pooling (1/2)
self.conv1_1 = CBR(3, 64)
self.conv1_2 = CBR(64, 64)
self.pool1 = nn.MaxPool2d(2, stride=2, ceil_mode=True)
# conv2: 64 → 128 → 128 → pooling (1/4)
self.conv2_1 = CBR(64, 128)
self.conv2_2 = CBR(128, 128)
self.pool2 = nn.MaxPool2d(2, stride=2, ceil_mode=True)
# conv3: 128 → 256 → 256 → 256 → pooling (1/8)
self.conv3_1 = CBR(128, 256)
self.conv3_2 = CBR(256, 256)
self.conv3_3 = CBR(256, 256)
self.pool3 = nn.MaxPool2d(2, stride=2, ceil_mode=True)
# pool3 후 feature를 1x1 conv로 클래스 수 채널로 줄임 (skip 연결용)
self.score_pool3_fr = nn.Conv2d(256, num_classes, kernel_size=1)
# conv4: 256 → 512 → 512 → 512 → pooling (1/16)
self.conv4_1 = CBR(256, 512)
self.conv4_2 = CBR(512, 512)
self.conv4_3 = CBR(512, 512)
self.pool4 = nn.MaxPool2d(2, stride=2, ceil_mode=True)
# pool4 후 feature를 1x1 conv로 줄임 (skip 연결용)
self.score_pool4_fr = nn.Conv2d(512, num_classes, kernel_size=1)
# conv5: 512 → 512 → 512 → pooling (1/32)
self.conv5_1 = CBR(512, 512)
self.conv5_2 = CBR(512, 512)
self.conv5_3 = CBR(512, 512)
self.pool5 = nn.MaxPool2d(2, stride=2, ceil_mode=True)
# fc6, fc7: fully conv layers
self.fc6 = nn.Conv2d(512, 4096, 1)
self.relu6 = nn.ReLU(inplace=True)
self.drop6 = nn.Dropout2d()
self.fc7 = nn.Conv2d(4096, 4096, 1)
self.relu7 = nn.ReLU(inplace=True)
self.drop7 = nn.Dropout2d()
# 클래스 수만큼 score 출력
self.score_fr = nn.Conv2d(4096, num_classes, kernel_size=1)
# 업샘플링 연산 정의
# 1/32 → 1/16
self.upscore2 = nn.ConvTranspose2d(num_classes, num_classes,
kernel_size=4, stride=2, padding=1)
# 1/16 → 1/8
self.upscore2_pool4 = nn.ConvTranspose2d(num_classes, num_classes,
kernel_size=4, stride=2, padding=1)
# 1/8 → 원본 해상도
self.upscore8 = nn.ConvTranspose2d(num_classes, num_classes,
kernel_size=16, stride=8, padding=4)
def forward(self, x):
h = self.conv1_1(x)
h = self.conv1_2(h)
h = self.pool1(h)
h = self.conv2_1(h)
h = self.conv2_2(h)
h = self.pool2(h)
h = self.conv3_1(h)
h = self.conv3_2(h)
h = self.conv3_3(h)
pool3 = h = self.pool3(h) # 1/8 크기, skip 연결용
score_pool3c = self.score_pool3_fr(pool3) # 클래스 수 채널로 줄임
h = self.conv4_1(h)
h = self.conv4_2(h)
h = self.conv4_3(h)
pool4 = h = self.pool4(h) # 1/16 크기, skip 연결용
score_pool4c = self.score_pool4_fr(pool4)
h = self.conv5_1(h)
h = self.conv5_2(h)
h = self.conv5_3(h)
h = self.pool5(h) # 1/32 크기
h = self.fc6(h)
h = self.relu6(h)
h = self.drop6(h)
h = self.fc7(h)
h = self.relu7(h)
h = self.drop7(h)
h = self.score_fr(h) # 클래스 점수 맵
upscore2 = self.upscore2(h) # 1/32 → 1/16
h = upscore2 + score_pool4c # skip 연결 (pool4)
upscore2_pool4c = self.upscore2_pool4(h) # 1/16 → 1/8
h = upscore2_pool4c + score_pool3c # skip 연결 (pool3)
upscore8 = self.upscore8(h) # 1/8 → 원본 해상도
return upscore8 # shape: (N, num_classes, H, W)
